
# > gbc_ms
# id start stop status from to hormone age meno size grade nodes
# 1 0.000000 43.836066 1 0 1 1 38 1 18 3 5
# 1 0.000000 43.836066 0 0 2 1 38 1 18 3 5
# 1 43.836066 74.819672 0 1 2 1 38 1 18 3 5
# 2 0.000000 46.557377 1 0 1 1 52 1 20 1 1
# 2 0.000000 46.557377 0 0 2 1 52 1 20 1 1
# 2 46.557377 65.770492 0 1 2 1 52 1 20 1 1
# ...Applied Survival Analysis
Chapter 12 - Multistate Models
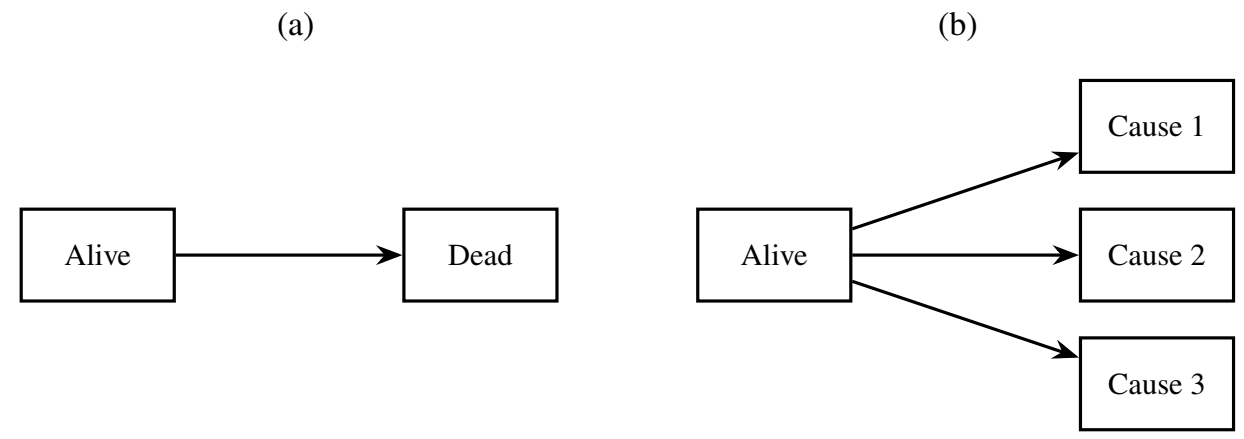
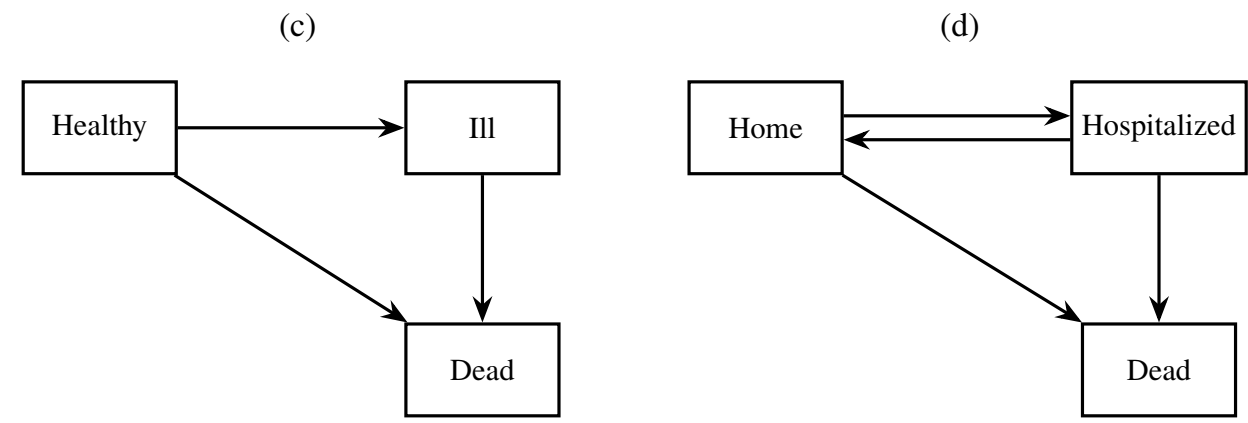
Life-Death & Competing Risks
- Multistate model
- A model specifying possible transitions
- Examples
- Life-death (two states: transient \(\to\) absorbing)
- Competing risks (\(K+1\) states: transient \(\to\) \(K\) absorbing states)
![]()
Illness-Death Model
- Examples
- Illness-death model (three states: healthy, ill/hospitalized, dead)
- Semi-competing risks
- Progressive: healthy \(\to\) ill \(\to\) dead
- Reversible: healthy \(\rightleftharpoons\) ill \(\to\) dead
Recurrent Events
- Examples
- Recurrent events (with death) (progressive transient states \(\to\) absorbing)
![]()
- Recurrent events (with death) (progressive transient states \(\to\) absorbing)
- Two types of processes
- Progressive: only forward, no turning back
- Reversible: may go back and forth (hospital admission/discharge)
Intensity Function: Examples (I)
- With \(Y(0)\equiv 0\)
- Life-death model (\(T\): time to death) \[ \lambda_{01}\{t\mid\mathcal H^*(t-)\} = \lambda(t):\,\, \mbox{hazard of $T$} \]
- Competing risks (\(T\): time to overall failure) \[ \lambda_{0k}\{t\mid\mathcal H^*(t-)\} = \lambda_k(t):\,\, \mbox{$k$th cause-specific hazard} \]
Intensity Function: Examples (II)
- Recurrent events
- Counting process: \(N^*(t)\)
- Intensity for recurrent-event process (Chapter 9) \[\begin{equation}\label{eq:rec:intensity} \ell\{t\mid \overline{N}^*(t-)\}\dd t=E\{\dd N^*(t)\mid \overline{N}^*(t-)\} \end{equation}\]
- Intensity for transition \[\begin{align} \lambda_{k-1,k}\{t\mid\mathcal H^*(t-)\}\dd t &= E\{\dd N^*(t)\mid N^*(t-) =k-1, \overline{N}^*(t-)\}\\ &= \mbox{A sub-function of }\ell\{t\mid \overline{N}^*(t-)\} \end{align}\]

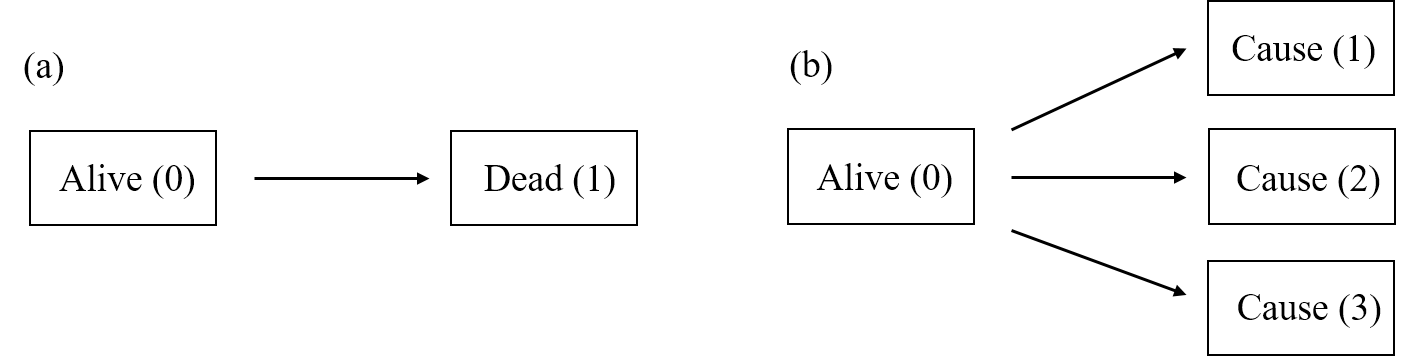
Multistate Setup
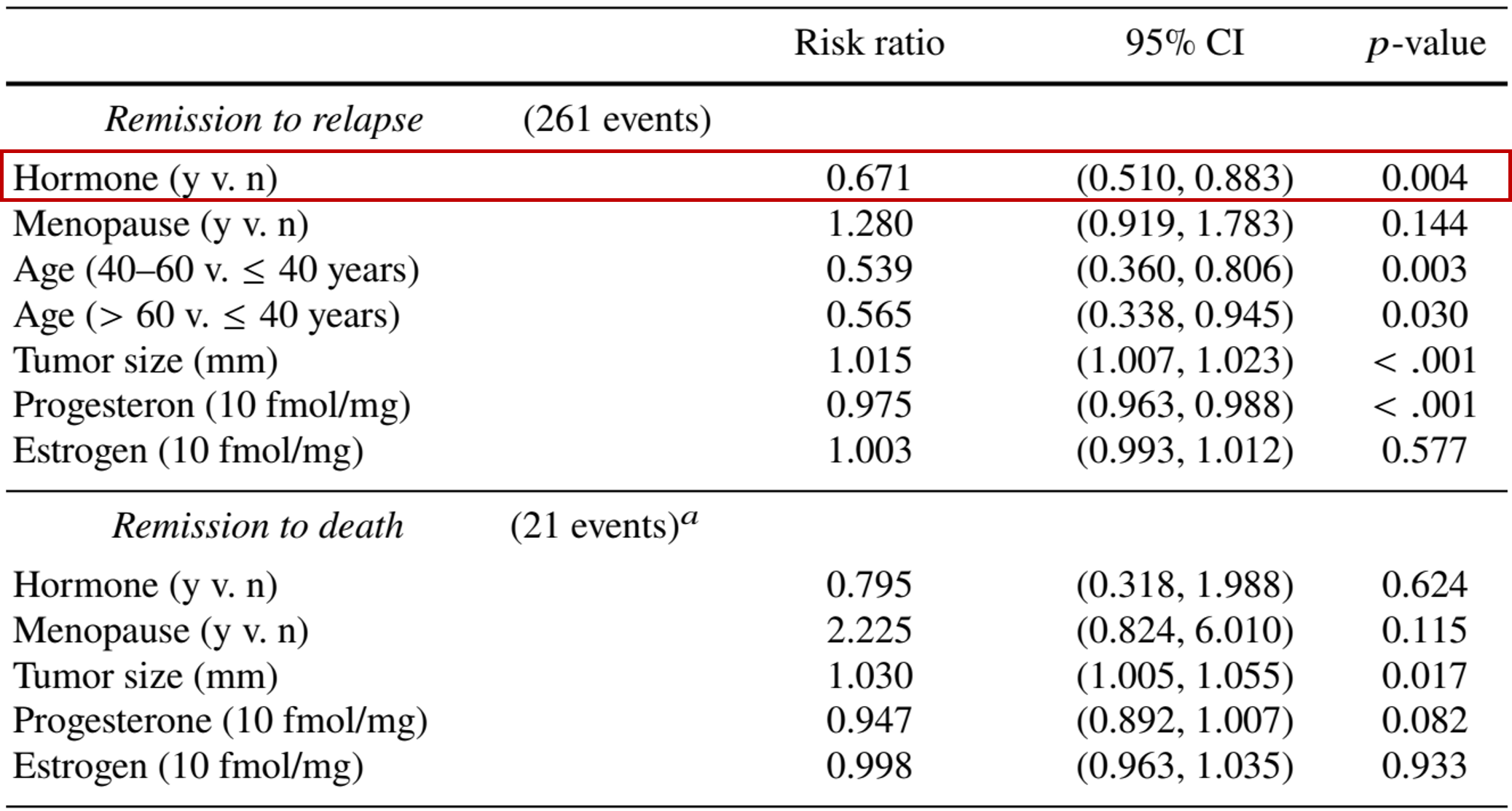
Regression Results (I)
- Regression table
- Hormonal therapy beneficial on relapse (32.2% risk reduction; \(p\)-value 0.005)
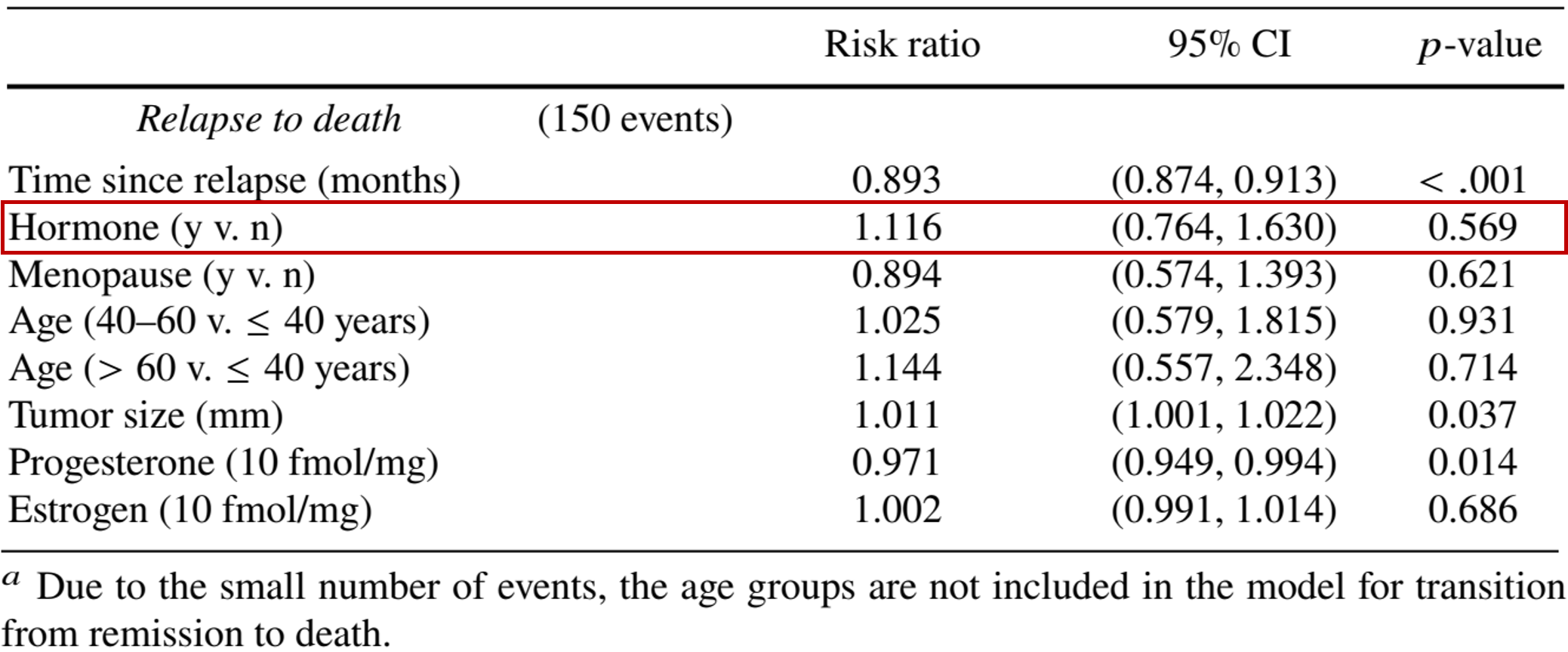
Regression Results (II)
- Regression table
- Hormonal therapy no significant effect on progression from relapse to death
- One month away from relapse patient is at 1.7% higher risk of mortality (non-significant)
Notes
- Methods and Software
- Nonparametric estimation of transition probability for Markov process: Chapter IV.4 of Andersen et al. (1991)
- Text: Cook and Lawless (2018)
- R-packages
mstate: competing risks models and prediction of transition probabilitiesmsm: Hidden Markov Models (HMMs) & standard models
Summary
- Multistate models
- Multistate process \(Y(t)\in \{0, 1,\ldots, K\}\)
![]()
- Transition intensity: risk of going to another state given current state and history
- Multistate process \(Y(t)\in \{0, 1,\ldots, K\}\)
- Cox-type multiplicative intensity models
- Markov or semi-Markov models for intensity \(k\to j\)
coxph(Surv(start, stop, status) ~ covariates, subset = (from==k)&(to==j))
- Markov or semi-Markov models for intensity \(k\to j\)